
Comunicar Compactlogix & JXC918 Controller
hace 6 días · Actualizado hace 5 días
📋Aquí podrás Encontrar✍
Compactlogix & JXC918
En esta ocasión realicé una comunicación exitosa entre un PLC CompactLogix de Allen-Bradley y un controlador de motor a pasos modelo JXC918 de la marca SMC, utilizando el protocolo EtherNet/IP.
A continuación, comparto el procedimiento general, las características más relevantes del equipo y algunos resultados obtenidos durante las pruebas.
🔧 Características del controlador SMC JXC918
El JXC918 es un controlador diseñado para operar actuadores eléctricos de la serie LEY, LEYB, LEFS, LEL o similares de SMC, mediante diferentes interfaces de comunicación, incluyendo EtherNet/IP, EtherCAT, PROFINET o RS-485.
Entre sus principales características destacan:
- Comunicación EtherNet/IP nativa, compatible con controladores Allen-Bradley.
- Permite el control remoto completo del actuador: movimiento, “home”, selección de posición, y monitoreo de estado.
- Soporta dos modos de operación principales:
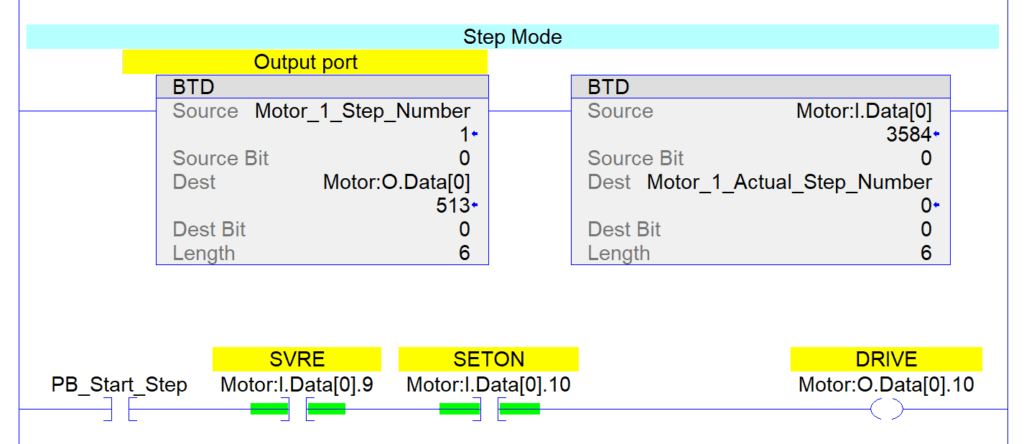
- STEP Mode: ejecución de posiciones preconfiguradas (hasta 64 pasos).
- Numerical Mode: control directo mediante datos numéricos enviados desde el PLC, pudiendo modificar parámetros como posición, velocidad o aceleración en tiempo real.
- Dispone de funciones de diagnóstico, alarmas y estados accesibles por comunicación o mediante indicadores LED en el frontal del equipo.
- Configurable mediante rotary switches para selección de dirección IP o modo DHCP.
- Permite operación manual (JOG) desde entradas digitales o por comandos remotos vía red.
⚙️ Asignación de dirección IP
Para integrar el controlador al sistema EtherNet/IP, fue necesario asignarle una dirección IP fija.
El procedimiento utilizado fue el siguiente:
- Configurar los rotary switches del equipo en el valor 255 (modo DHCP).
- Energizar el controlador durante 10s-20s
- Apagar el controlador
- Cambiar los rotary switches a 000 (modo Remote Control)
- Encender el controlador
- Utilizar el software BOOTP/DHCP Server de Rockwell Automation para detectar el dispositivo y asignarle una IP.
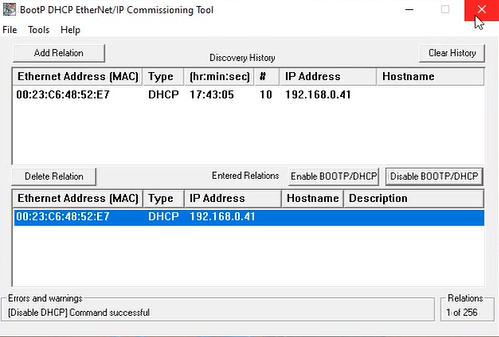
Este método es sencillo y totalmente compatible con los entornos de Rockwell, evitando la necesidad de software adicional de SMC.
🔌 Integración y mapeo de señales
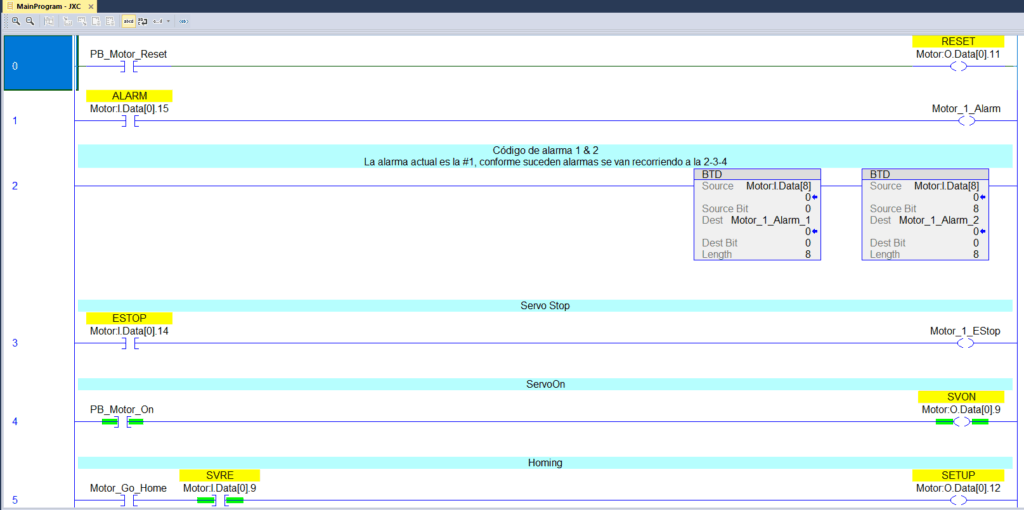
Siguiendo el manual de configuración EtherNet/IP de SMC, se realizó el mapeo de señales de entrada y salida dentro del CompactLogix.
Esto implicó definir las estructuras de datos que representan los bits de control y estado del JXC918, tales como:
- Entradas (Inputs): posiciones alcanzadas, estado del servo, flags de movimiento, alarmas, etc.
- Salidas (Outputs): comandos de habilitación, home, jog, start, selección de step o posición numérica.
Este mapeo permite controlar el actuador directamente desde el PLC sin necesidad de módulos de E/S físicas adicionales.

🧭 Pruebas realizadas
Una vez completada la configuración, se llevaron a cabo diversas pruebas de funcionamiento:
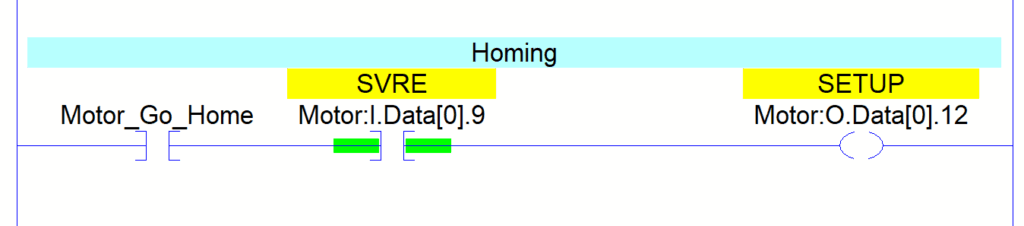
- Activación del servo y referencia (Home) correctamente.
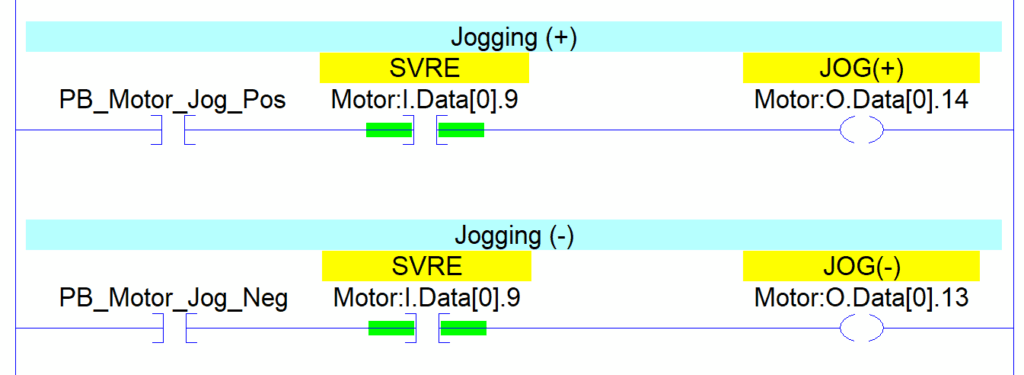
- Movimientos manuales (JOG) desde el PLC, verificando respuesta inmediata.
- Ejecución por STEP, seleccionando y ejecutando pasos preconfigurados en el controlador.
- Ejecución por modo Numérico, donde se envían parámetros como posición, velocidad y aceleración directamente desde el PLC, logrando una gran flexibilidad para control dinámico.
El sistema respondió de forma estable y con tiempos de comunicación adecuados para aplicaciones de posicionamiento industrial.
🎥 Video demostrativo: configuración y pruebas paso a paso
Para complementar este artículo, preparé un video detallado en mi canal de YouTube, donde muestro todo el procedimiento paso a paso:
desde la asignación de IP hasta la ejecución de los movimientos por STEP y por modo numérico.
👉 [Ver video en YouTube (proximamente)]
En el video se explican visualmente las configuraciones, el mapeo de señales y las pruebas de movimiento, ideal para quienes estén integrando un controlador SMC por primera vez.
💾 Descarga de rutina de ejemplo para CompactLogix
Además, pongo a disposición una rutina de ejemplo del programa que utilicé durante las pruebas.
Esta rutina puede ser agregada directamente a proyectos existentes en RSLogix 5000 o Studio 5000, y contiene:
- Bits y etiquetas mapeadas a las señales del JXC918.
- Secuencia básica de control para home, jog, y ejecución de steps.
- Ejemplo de estructura para el control numérico (posición, velocidad y aceleración).
👉 [Descargar rutina de ejemplo (.L5X)]
Esta rutina facilita la integración inicial y sirve como base para desarrollar lógicas más complejas en aplicaciones de posicionamiento o automatización con actuadores eléctricos.
⭐️ Si quieres saber más de otros artículos parecidos a Comunicar Compactlogix & JXC918 Controller puedes visitar nuestra categoría Allen Bradley. Te esperamos dentro 👍
Descargar Moneo IFM

🧠 Comunicar un PLC MicroLogix 1400 & Avery Weigh-Tronix ZM201 mediante Ethernet TCP

Descargar RSLogix 500
Deja una respuesta
Entradas de Interes