¿Cómo Comunicar PLC Compactlogix con un Robot Fanuc?
hace 3 años · Actualizado hace 2 años

📋Aquí podrás Encontrar✍
Comunicar PLC Compactlogix con un Robot Fanuc
Para comunicar unComunicar PLC Compactlogix con un Robot Fanuc, es necesario utilizar un módulo de comunicación que permita la transferencia de datos entre los dispositivos.
La forma más común de hacerlo es a través del uso del protocolo Ethernet/IP. Ambos dispositivos deben estar conectados a la misma red Ethernet y configurados con direcciones IP únicas.
A continuación, se deben seguir los siguientes pasos:
- Configurar el módulo de comunicación Ethernet/IP en el CompactLogix. Para ello, es necesario crear una nueva conexión Ethernet/IP en el software de programación de Allen Bradley y configurar los parámetros de red del módulo de comunicación.
- Configurar el robot Fanuc para que se comunique mediante Ethernet/IP. El robot debe estar configurado para utilizar el mismo rando de dirección IP y el mismo puerto que el módulo de comunicación del CompactLogix.
- Crear una conexión lógica en el software de programación del CompactLogix. En este paso, se debe crear una nueva conexión lógica que permita la transferencia de datos entre el módulo de comunicación y el robot Fanuc. Es importante definir los tipos de datos que se van a intercambiar.
- Programar la transferencia de datos entre los dispositivos. Una vez que se ha establecido la conexión entre los dispositivos, es necesario programar la transferencia de datos entre ellos. Esto se puede hacer mediante el uso de instrucciones específicas de Allen Bradley y Fanuc.
Es importante tener en cuenta que la configuración y programación de la comunicación entre un CompactLogix y un robot Fanuc puede variar dependiendo de los modelos y versiones de los dispositivos involucrados. Por lo tanto, se recomienda consultar las especificaciones y documentación de ambos dispositivos antes de iniciar la configuración.
Cambiar la IP de un Robot FANUC
Para cambiar la dirección IP de un robot Fanuc, siga los siguientes pasos:
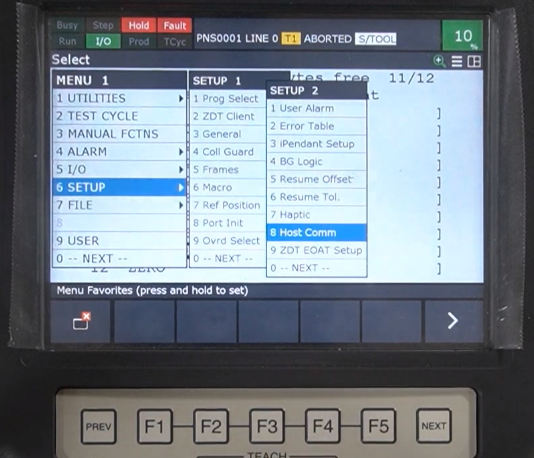
- Presionar el botón "Menú" - 6 Setup - Setup 2 - 8 Host Comm
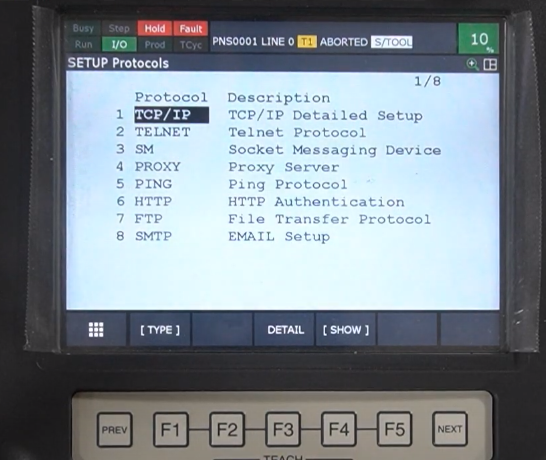
- En la ventana de "Setup Protocols" seleccionar TCP/IP y presionar Enter
- En esta ventana se debe de ajustar la IP y la submascara de Red según se requiera. Solo es necesario posicionarse sobre el parámetro que se desea cambiar y presionar la Tecla Enter, en mi caso yo selecciono la opción de Keyboard.
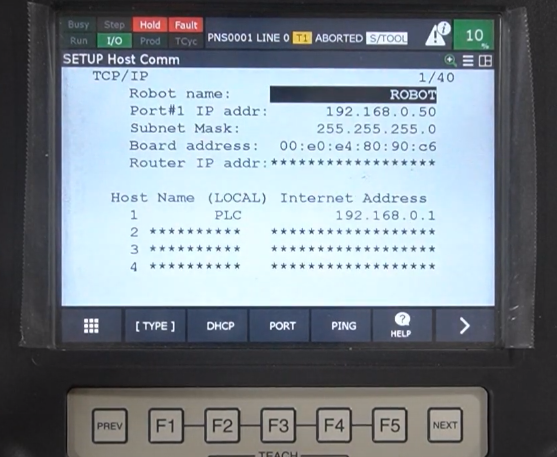
- Seleccione "OK" para guardar la configuración y salir del menú.
- Reinicie el robot para que los cambios surtan efecto.
Configurar Robot Fanuc como Adaptador de Ethernet IP
Para configurar un robot Fanuc como adaptador de Ethernet/IP, siga los siguientes pasos:

- Conecte el robot Fanuc a la red Ethernet/IP. Asegúrese de que el robot esté conectado a la misma red que el dispositivo que se comunicará con él.
- Abra el menú de configuración en el panel de control del robot. Seleccione "I/O" y luego "Ethernet/IP" en el menú.
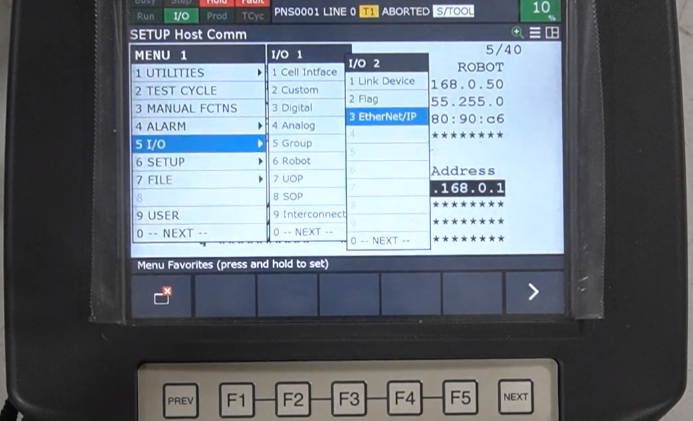
- En el menú "I/O Ethernet/IP", seleccione "ADP" para configurar el robot como adaptador de Ethernet/IP.
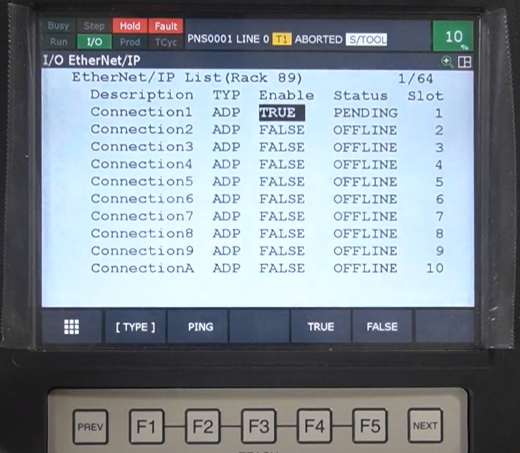
- Presione la tecla F4 "CONFIG" para ajustar el tamaño de entrada y salida que se utilizaran para la transferencia de datos entre el Robot y el PLC
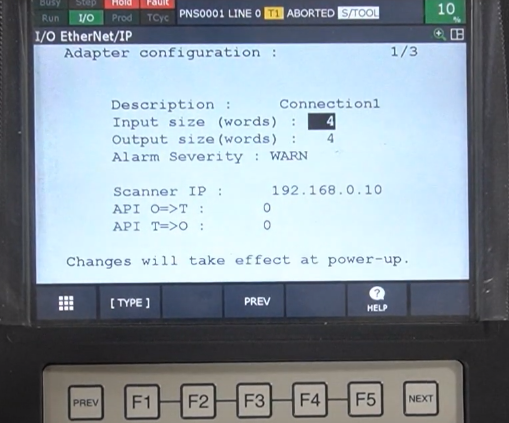
- Seleccione "OK" para guardar la configuración y salir del menú.
Configuración de señales entre el PLC y el Robot Fanuc
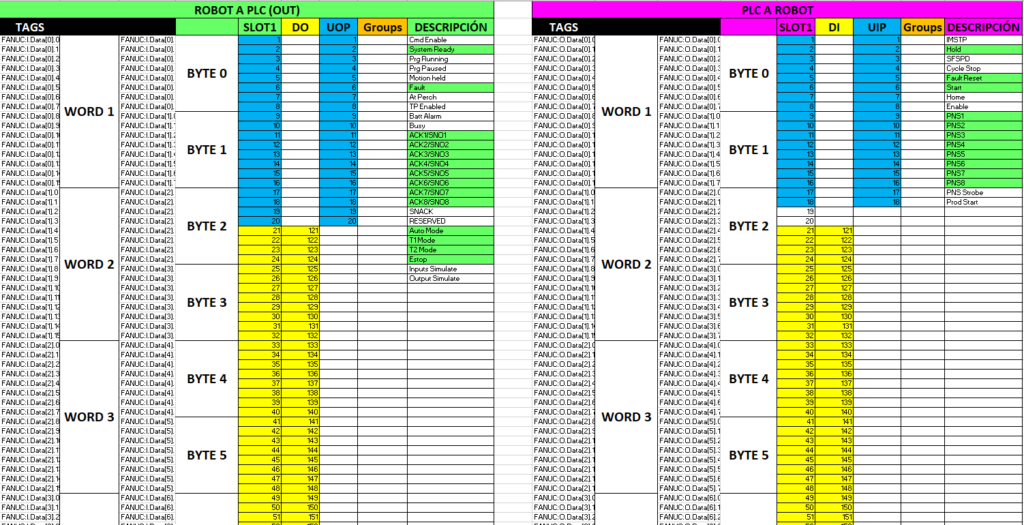
Después de asignar un IP al Robot y configurarlo como adaptador de Ethernet IP, ahora es necesario indicarle cuales señales queremos transferir y recibir con el PLC. Las señales que enlazaremos son:
- Entradas y Salidas Digitales
- Grupos
- Señales UOP
Este procedimiento es algo extenso y el objetivo es obtener algo similar a lo que se muestra en la imagen. Enlazar cada uno de los Tags del PLC con cada una de las señales del Robot. Te dejo un enlace para que puedas obtener el archivo de EXCEL Mapping_PLC_FANUC.
Para una explicación mas detallada te dejo un video en el que explico paso a paso como realizar dicha configuración de señales.

Intercambiar Datos entre el PLC y Robot FANUC
Para poder establecer la comunicación entre el PLC y el Robot FANUC, es necesario crear un Módulo Génerico de Ethernet IP, la configuración debe de quedar como en la siguiente imagen:
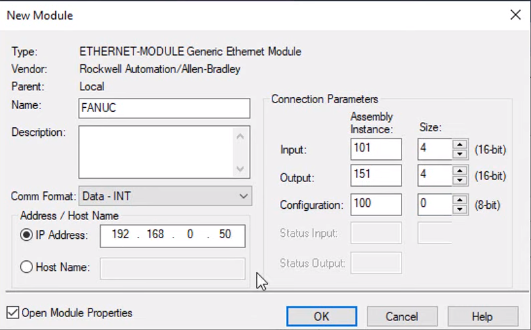
Por último solo es necesario verificar que las señales de salida del Robot sean leídas por el PLc y viceversa, que la señales de salida del PLC sean recibidas por el Robot.
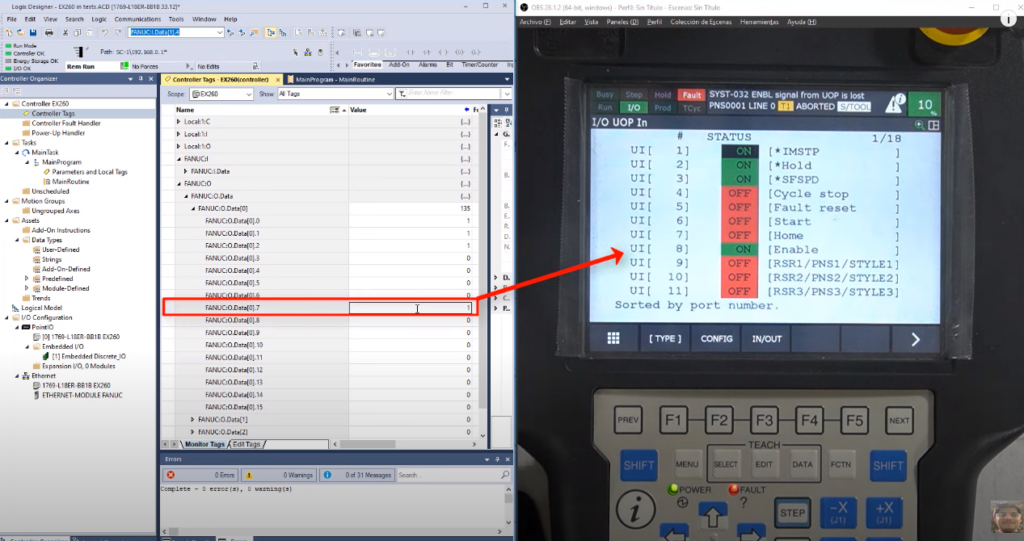
En la siguiente imagen se muestra un ejemplo en el que se están activando varias salidas del PLC que corresponden a señales UOP de Entrada del Robot.
Para conocer mas a detalle el ejercicio de la comunicación entre el Robot y el PLC te dejo el siguiente video en el que explicamos paso a paso el procedimiento.

⭐️ Si quieres saber más de otros artículos parecidos a ¿Cómo Comunicar PLC Compactlogix con un Robot Fanuc? puedes visitar nuestra categoría Allen Bradley. Te esperamos dentro 👍
Comunicación entre un PLC CompactLogix y TBEN-S2-2RFID Turck mediante Ethernet/IP

Comunicar PLC Compactlogix & IV4 Keyence

Descargar Moneo IFM
Deja una respuesta
Entradas de Interes